拓展器材综合服务商

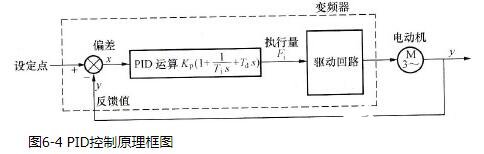
PI操控是由份额操控(P)和积分操控(I)组合成的,依据差错及时刻改动发生一个履行量。PI运算是P运算和I运算之和。
PD操控是由份额操控(P)和微分操控(D)组合成的,依据改动动态特性的差错速率发生一个履行量。PD运算是P运算和D运算之和。
使用PI操控和PD操控的长处组合成的操控。PID运算是P、I和D三个运算的总和。
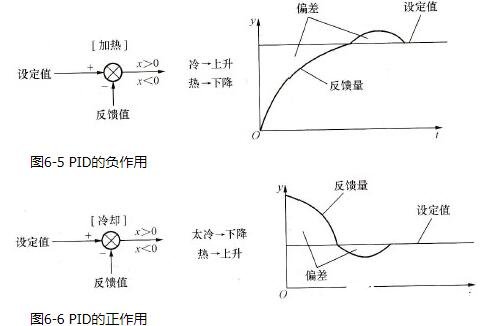
当差错x(x=设定值-反响量)为正时,添加履行量(输出频率),假如差错为负,则减小履行量。PID的负效果如图6-5所示。
当差错x(x=设定值-反响量)为负时,添加履行量(输出频率),假如差错为正,则减小履行量。PID的正效果如图6-6所示。
首要为PID调理器给定一个电信号xt,该给定电信号对应着体系的给定压力pp,当压力传感器将供水体系的实践压力px转变成电信号(即xf),送回PID调理器的输入端时,调理器首要将它与压力给定电信号xt相比较,得到的差错信号为△x,即:
△x》0:给定值大于供水压力,在这种状况下,水泵应升速。△x越大,水泵的升速起伏越大。
△x《0:给定值小于供水压力,在这种状况下,水泵应降速。△x越大,水泵的降速起伏越大。
假如△x的值很小,或许反响就不行活络。别的,不论操控办理体系的动态呼应多么好也不或许彻底消除静差。这儿的静差是指△x的值不或许彻底降到0,而一直有一个很小的差值存在,从而使操控办理体系出现了差错。
P功用便是将△x的值按份额进行扩大(扩大P倍),这样虽然△x的值很小,经扩大后再来调整水泵的转速也会比较精确而敏捷。扩大后,△x的值大起伏提高,静差s在△x中占的份额也相对削减,从而使操控的活络度增大,差错减小。
那么P值的巨细对操控办理体系有何影响呢?假如P值设得过大,△x的值变得很大,供水体系的实践压力px调整到给定值pp的速度必定很快。但由于拖动体系的惯性原因,很容易发生px》pp的状况,这种现象称为超调。所以操控又有必要反方向调理,这样就会使体系的实践压力在给定值(恒压值)pp邻近来回振动,如图7-14(b)所示。
剖析发生振动现象的原因:主要是加、减速进程都太快的原因,为了缓解因P功用给定过大而引起的超调振动,能够引进I功用。
I功用便是对差错信号△x积分后再输出,其效果是延伸加快和减速的时刻,以缓解因P(份额)功用设置过大而引起的超调。P功用与I功用结合,便是PI功用,图7-14(c)便是经PI调理后供水体系实践压力px的改动波形。
从图中看,虽然添加I功用后使得超调削减,避免了供水体系的压力振动,可是也延伸了供水压力从头再回到给定值pp的时刻。为客服上述缺点,又添加了D功用。
D功用便是对差错信号△x取微分后再输出。也便是说,当供水压力px刚开始下降时,dpx/dt最大,此刻△x的改动率最大,D输出也就最大。此刻水泵的转速会忽然增大一下。跟着水泵转速的逐步升高,供水压力会逐步康复,dPx/dt会逐步减小,D的输出会敏捷衰减,供水体系又出现PI调理。